Senior Design Capstone / Lafayette College Mechanical Engineering
A remote-controlled watercraft that pulls people out of swift-water currents, so the rescuer never has to get in.

01 — The problem
Finding one thing eleven people could build together.
Every senior at Lafayette spends two semesters on a single capstone. The first is about finding a real problem worth solving and proving out a direction through research, models, and small-scale prototypes. The second is designing, manufacturing, and testing the actual thing, run across an alpha and a beta phase with a report and a presentation at each.
Our team of eleven started split. Half of us wanted to improve a robotic pool cleaner, the other half wanted a more compact take on a Hoyer patient lift. Our professor had a phrase he never let us forget: collective inspiration. The idea that a team moves fastest when everyone shares the same picture of what they are building, so no one is thrown off when someone else makes a call. We did not have it yet.
He pointed us toward what both halves actually wanted: something involving water, since a good chunk of the team swam competitively, and something that helped people. We brainstormed problems sitting at that intersection and landed on one that genuinely mattered. Rescuing people caught in swift-water currents, whether that meant a beach, a lake, or open water.
02 — The craft
Keep the rescuer on shore. Send the boat instead.
We designed a remote-controlled rescue boat. The whole point was to keep the rescuer out of the water, which removes the single biggest risk in a swift-water rescue: a second person getting into trouble. An operator drives the craft out to the victim, the victim holds on, and a rope tethered to the boat pulls both of them back to shore or to a rescue vessel.
- ApproachOperator drives the craft to the person in the water from a safe position on land.
- RecoveryThe person holds on and a tethered rope draws the boat and the person back in.
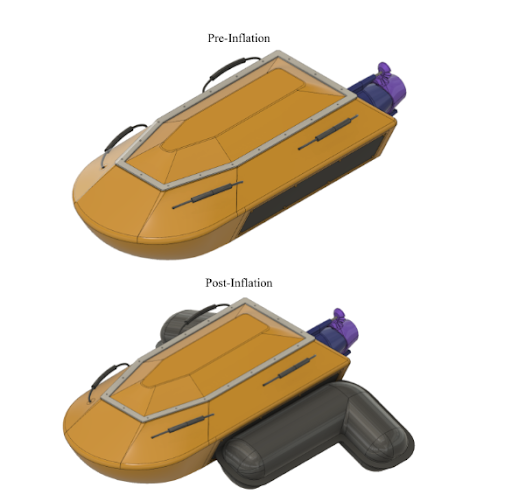
- PropulsionA jet-drive system, same idea as a jet ski. No exposed propeller means nothing that can injure the person, and no impeller to damage on sand or debris.
- ConceptWe explored a dual-intake, invertible hull, so the craft could keep working even after flipping in rough water.
03 — My work: controls
Making a boat drive predictably in water that is anything but.
I owned the control system end to end, from deciding what to control down to keeping the electronics dry.
Choosing what to control
I started by figuring out what the boat actually needed to control, what kind of controller would fit, and what range it had to cover. The easy answer was simple throttle control, but I made the case for something more useful: velocity control. With velocity control the boat holds the same speed through any current, so the operator is not constantly fighting the water to keep a steady approach.
I talked it through with our professor to pin down what was feasible and what he expected from me. Position control came up and we ruled it out. It was more complex than the project needed, and with no vision processing to decide where the boat should go, closed-loop position control would not have added anything. Velocity control was the right level. Genuinely helpful, and not so complex that it made the boat harder to drive.
Measuring velocity was the hard part
To close the loop I needed to know how fast the boat was actually moving, and that turned out to be the real challenge. My first plan was an IMU, but between sensor drift and the constant oscillation of a hull on the water, the readings were not something I could trust. I switched to a GPS-based approach and chose a SparkFun NEO-M9N GNSS module for its update rate and accuracy, which gave me a clean velocity signal to control against.
The control loop
An Arduino Nano 33 BLE Sense Rev2 ran all the processing. It read the PWM signal coming from the operator's controller, ran that setpoint through a PD controller I tuned for the boat, and sent a PWM signal back out to the motor controller to set the speed. I validated the full loop on the water at Merrill Creek Reservoir.
Closed-loop velocity control. GPS-measured speed feeds back against the operator setpoint.
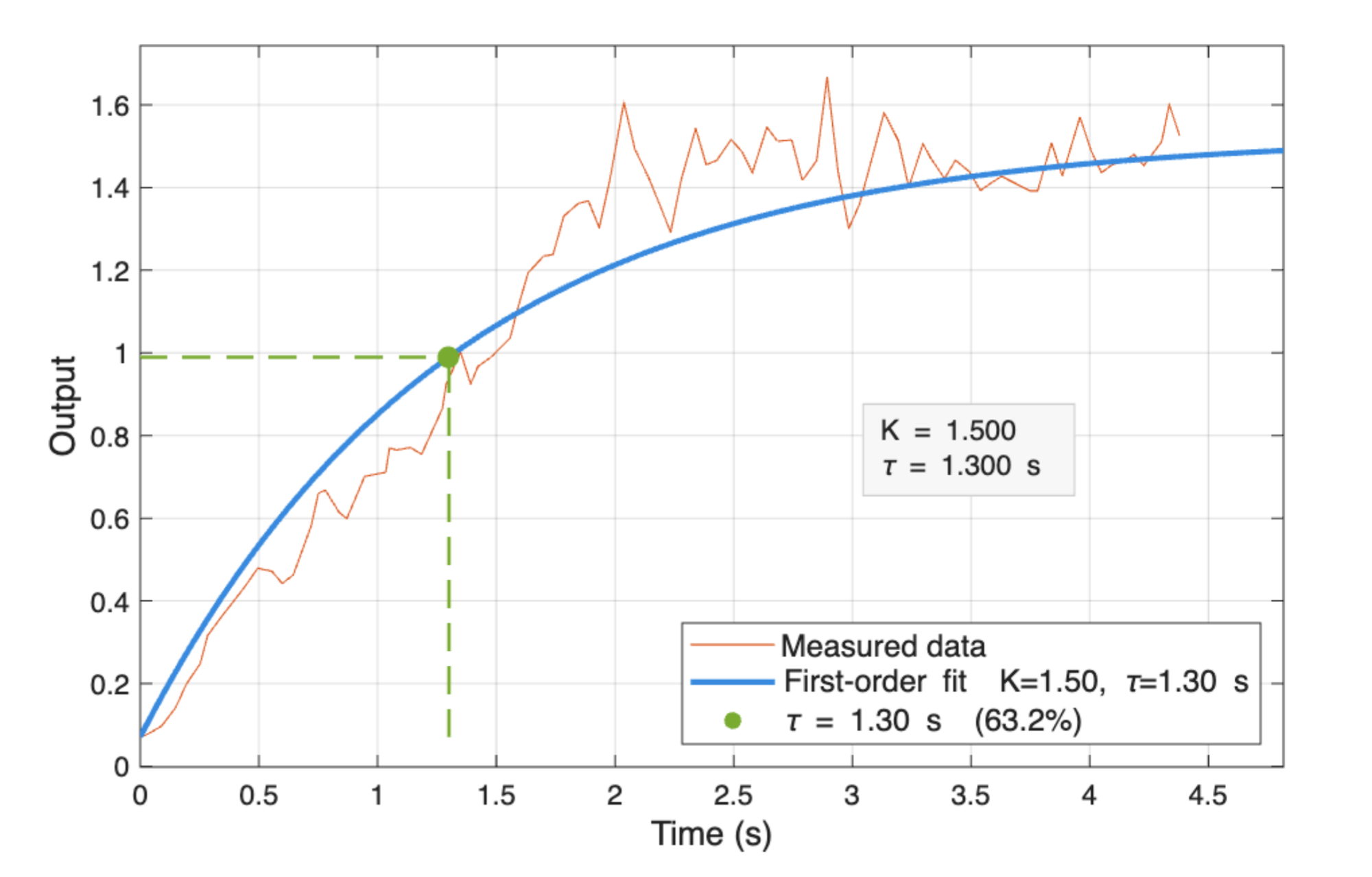
Those numbers were not guesses. I drove a step input into the system and fit a first-order model to the measured response to pull the gain and time constant, then tuned the PD controller from there.
Keeping the electronics alive
None of this matters if the electronics get wet. I housed the system in a waterproof junction box, drilled ports through the side, and fitted them with grommets so the PWM cables could pass through without breaking the seal.
04 — My work: leadership
Leading the team and building my own piece at the same time.
I was one of three team leads, which meant I carried a lot of how the team actually ran day to day. Managing eleven college students is its own kind of challenge, and six of ours were also Division I athletes juggling full training schedules on top of the project.
My job was to keep people moving on what they were responsible for, giving guidance and jumping in to help when it was needed, and to make the big calls alongside the other two leads. I planned our meetings so they were an efficient use of everyone's time, scheduled extra ones outside of class when the work called for it, and did full read-throughs and edits of our reports before they went out. Through all of it I still owned my own part of the project, the control system, so I was leading and building in parallel the whole way.
05 — Takeaway